一、产品概述
轨道智能双机械臂激光除锈装备,是面向轨道交通运维与轨道制造场景打造的智能自动化表面处理装备。系统以视觉引导 + 双机协同为核心架构,采用非接触式激光除锈技术,可对轨道端面、上下表面及侧面进行全域、精准、高效的锈蚀清洁处理,全程无需化学介质、不损伤基材,实现轨道除锈作业的智能化、标准化、无人化升级,有效提升轨道运维质量与作业效率,适配现代化轨道生产线与检修线的稳定运行需求。

二、应用场景
轨道制造生产线:新轨出厂前表面预处理、锈蚀清洁与质量一致性保障。
轨道运维检修中心:在役轨道定期除锈、表面修复与性能恢复作业。
轨道仓储与周转环节:长期存放轨道的防锈前处理、返锈快速清洁。
轨道交通维保基地:批量轨道集中化、自动化除锈作业。

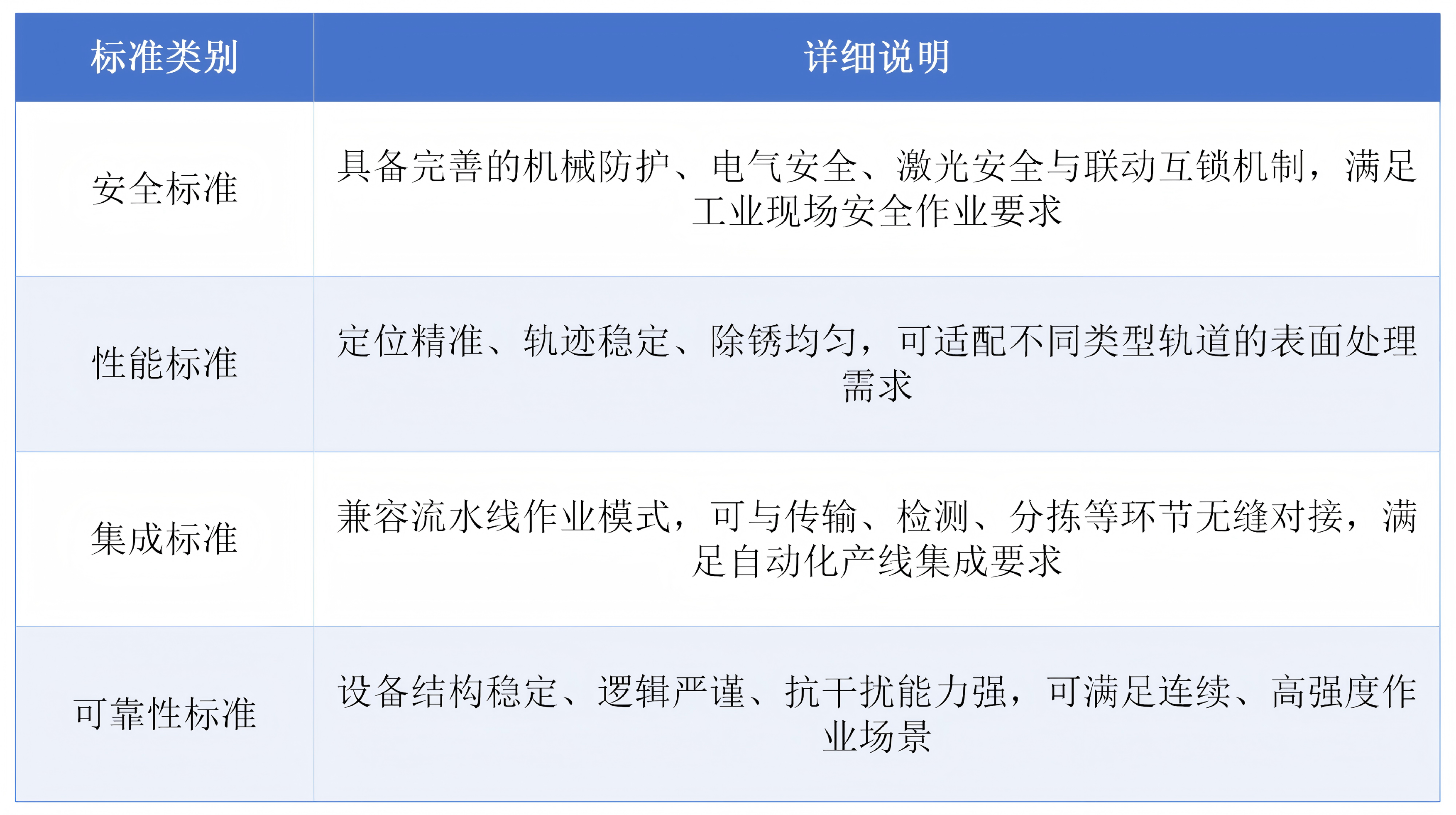
三、产品标准
四、核心功能介绍
(一)视觉引导与智能决策系统
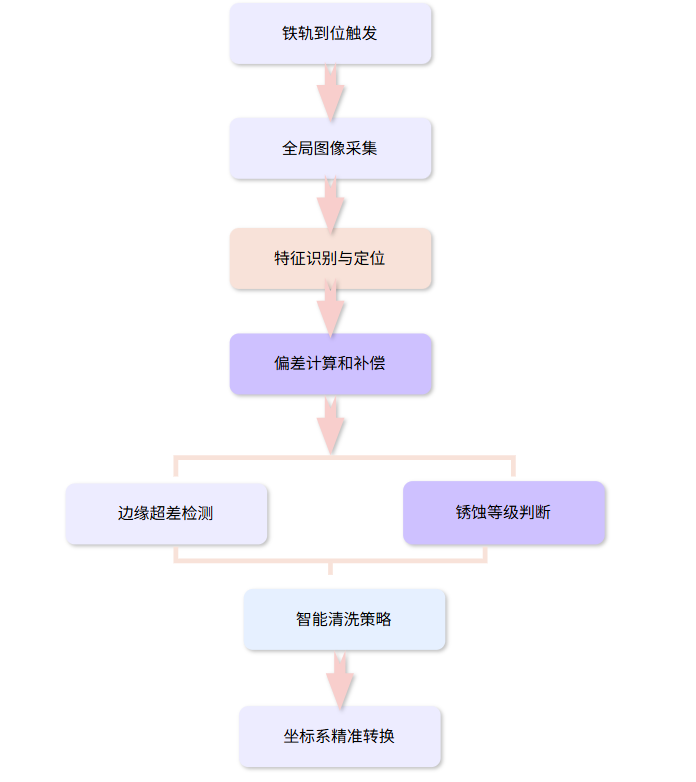
系统搭载高精度视觉识别单元,实现从检测 — 识别 — 判定 — 规划的全流程智能决策,为机械臂提供精准作业依据。
铁轨到位触发:配合传感装置,自动识别轨道进入作业区域,启动视觉采集流程。
全局图像采集:对轨道端面与表面进行高清图像获取,采集位置、纹理等关键信息。
特征识别与定位:自动识别轨道轮廓、边缘及关键表面,完成精准定位。
偏差计算与补偿:比对实际位置与理论位置,计算偏差并生成轨迹补偿参数。
边缘超差检测:判断轨道边界状态,自动适配并补偿除锈作业范围。
锈蚀等级判定:依据表面特征综合评估锈蚀程度,形成分级判定结果。
智能清洗策略:根据锈蚀程度自动匹配清洗方案,确定作业次数与运行模式。
坐标系精准转换:将视觉数据转换为机械臂可执行的空间坐标,确保轨迹精准无误。
(二)双机械臂协同控制系统
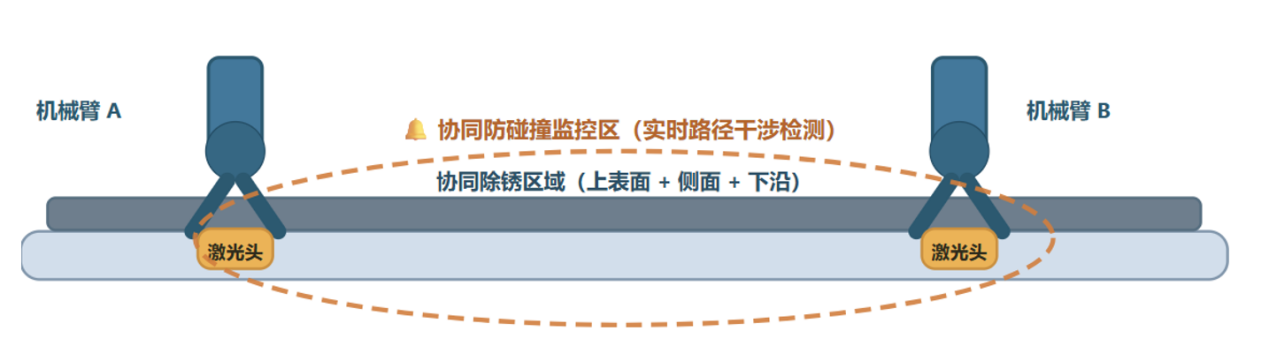
以双机协同执行机构替代传统固定结构,实现高效、安全、柔性的激光除锈作业。
双机同步作业:控制两台机械臂协同工作,同步处理轨道对应区域,内置完善防碰撞逻辑。
动态路径修正:依据视觉偏差数据,实时调整除锈轨迹,保证作业精度。
多面姿态自适应:末端执行器自动调整角度,覆盖轨道上表面、下表面及侧面全域。
多遍清洗执行:按智能策略自动完成对应次数的清洗,确保重锈区域处理到位。
自动归位与待机:作业完成后自动返回安全位置,避让流水线,保障流转顺畅。